

นักวิทยาศาสตร์และวิศวกรได้รับการสร้างและการเขียนโปรแกรมเปียโนที่ถูกเล่นโดยหุ่นยนต์ มานานหลายทศวรรษ แต่มีบางอย่างที่แตกต่างจากมือหุ่นยนต์ตัวใหม่ที่เลียนแบบด้วยเทคนิคที่มักสงวนไว้สำหรับมนุษย์โดยเฉพาะเท่านั้น
แทนที่จะพึ่งพามอเตอร์เป็นเวลาหลายสิบปีของหุ่นยนต์เปียโน ที่นำเสนอในก่อนหน้านี้ – แต่หุ่นยนต์ตัวใหม่นี้นิ้วของมันไม่ได้เชื่อมต่อกับมอเตอร์ใด ๆ แต่เป็นแขนกลแบบง่าย ๆ โดยจะมีการควบคุมเฉพาะข้อมือเท่านั้นและส่วนที่เหลือของมือก็จะได้รับแรงบันดาลใจจากกายวิภาคของมนุษย์
“ เป้าหมายของเราคือการหลีกเลี่ยงวิธีการแบบดั้งเดิมในวิทยาการหุ่นยนต์” โจซี่ ฮิวจ์นักวิจัยในภาควิชาวิศวกรรมของมหาวิทยาลัยเคมบริดจ์ผู้เป็นผู้นำการพัฒนาหุ่นยนต์ดังกล่าว.
ตอนนี้มือของมันยังห่างไกลจากศิลปินอย่าง Chopin หรือ Debussy แต่มันมีความสามารถในการแสดงสไตล์ที่แตกต่างกันและมันสามารถสะท้อนให้เราได้เห็นแล้ว“ Jingle Bells:”
การวิจัยเป็นอีกขั้นตอนหนึ่งในความพยายามในการออกแบบหุ่นยนต์ที่เคลื่อนไหวไปตามความต้องการของร่างกาย Cecilia Laschi ศาสตราจารย์แห่งสถาบัน BioRobotics แห่ง Scuola Superiore Sant’Anna จากอิตาลีกล่าว แม้ไม่ได้เกี่ยวข้องกับการศึกษา การพัฒนาในสาขานี้อาจนำไปสู่หุ่นยนต์ที่สามารถสำรวจสภาพแวดล้อมทางธรรมชาติหรือทำการวินิจฉัยทางการแพทย์โดยการสัมผัสด้วยมือได้
สำหรับแรงบันดาลใจฮิวจ์และผู้ทำงานร่วมกันนั้นได้รับมาจากมือของมนุษย์นั่นเอง
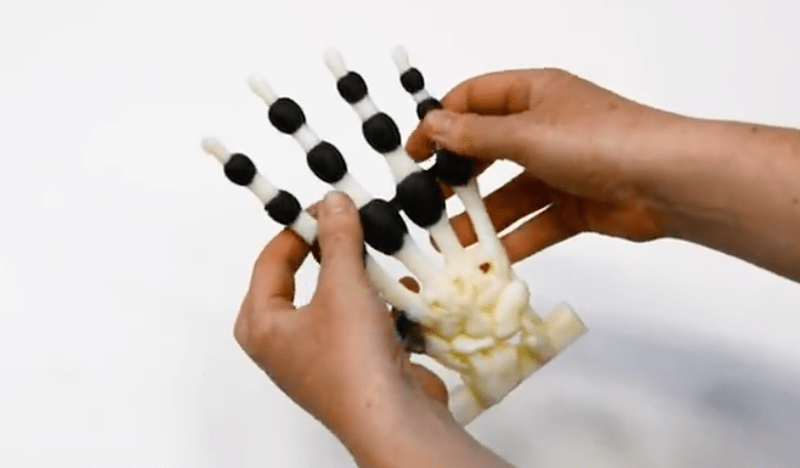
“ มนุษย์เราไม่เพียงแต่มีสติปัญญาในสมองของเราเท่านั้น แต่เรายังมีสติปัญญากระจายไปทั่วร่างกายของเรา” ฮิวจ์กล่าวเพิ่มเติมว่า“ ความฉลาดเกิดขึ้นจากโครงสร้างและกลไกทางกายภาพ” ด้วยเหตุนี้ทีมของเธอจึงออกแบบ มือกลที่มีกระดูกและเอ็นวางไว้ตามธรรมชาติ
นักวิจัยประดิษฐ์มือกลหุ่นยนต์ด้วยเครื่องพิมพ์ 3 มิติที่ผสมพลาสติกแข็งและยางนิ่มในอัตราส่วนที่ต่างกันเพื่อสร้างเอ็นและข้อต่อด้วยความแข็งที่แตกต่างกัน จากนั้นพวกเขาใช้มือกับแขนหุ่นยนต์ที่ใช้กันทั่วไปในสายการประกอบอุตสาหกรรมการผลิต

ในที่สุดทีมฮิวจ์ส หันมาใช้เพลงที่ซับซ้อนเป็นพิเศษ “ Rhapsody in Blue” โดยนักแต่งเพลงชาวอเมริกัน George Gershwin ช่วยให้พวกเขาจำลองว่านิ้วหัวแม่มือในการข้ามแป้นเพื่อสร้างระยะห่างที่เรียกว่า glissando ของความฝืดที่ต่ำในข้อต่อนิ้วหัวแม่มือ
เมื่อเปรียบเทียบกับหุ่นยนต์เปียโนรุ่นก่อน ๆ จำนวนมาก แสดงให้เห็นถึงความยืดหยุ่นในการควบคุมระดับเสียงการเคลื่อนไหวด้วยนิ้วโป้งและการเล่นได้ทั้ง staccato และ legato โดยทาง Ms. Hughes กล่าวว่า เธอวางแผนที่จะเพิ่มเซ็นเซอร์มอเตอร์และส่วนประกอบต่าง ๆ ที่ทำหน้าที่เหมือนเส้นเอ็นซึ่งจะช่วยสร้างพฤติกรรมที่หลากหลายให้กับมือแขนกลตัวนี้
ในท้ายที่สุดเธอหวังที่จะสร้างหุ่นยนต์ที่สามารถเล่นเปียโนได้อย่างชัดเจนแทนที่จะมุ่งเน้นไปที่ความแม่นยำในการเล่นเหมือนหุ่นยนต์ตัวอื่น ๆ
“ เรากำลังทำมากกว่าหุ่นยนต์ที่แข็งทื่อ” เธอกล่าว “ การเล่นเปียโนเป็นศิลปะ เรากำลังพยายามที่จะแนะนำความซับซ้อนความลึกและศิลปะเข้ากับพฤติกรรมของหุ่นยนต์ของเรา”
References :
https://www.nytimes.com/2018/12/19/science/piano-robot-hand.html